时间: 2024-06-21 06:13:29 作者: 智能驾驶域产品
座舱内部的摄像头,其功能特性和性能要求相对简单。例如,OMS乘客监控摄像头,一般达到5MP即可有良好的效果。同时,OMS也可应用于车内会议系统,还应用于车内儿童。DMS驾驶员监测系统,SVC 360环视摄像头,DVR行车记录仪,均为
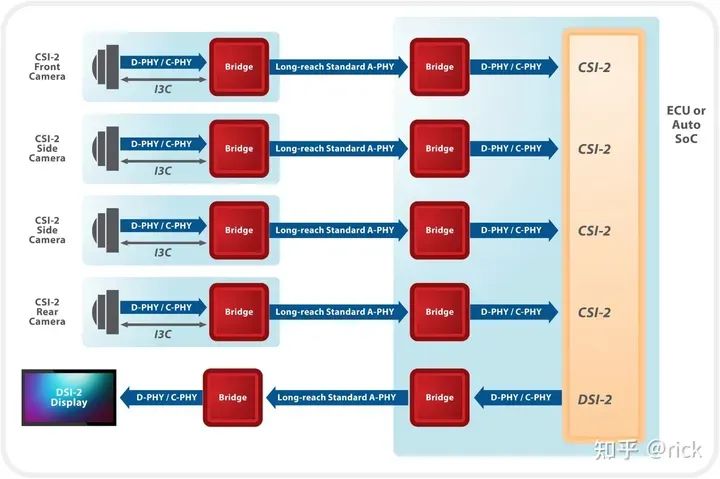
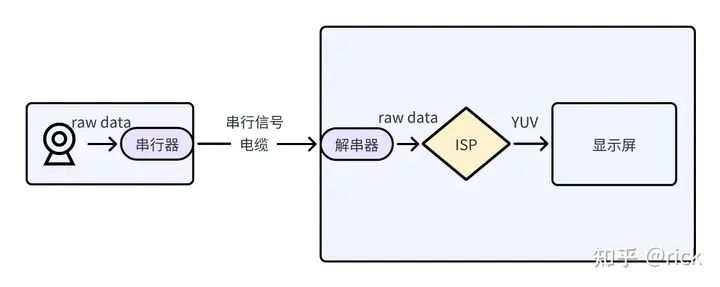
对于车载摄像头来说,它的特点在于摄像头的安装的地方,和ISP处理芯片之间的距离。在2MP以下的摄像头,一般会直接输出YUV格式的图像数据,无需额外的ISP进行图像处理。而2MP以上,则摄像头会输出raw原始数据,需要有独立的ISP进行摄像头图像格式处理。由于摄像头使用数目很多,如果每个摄像头都安排一个ISP,那么成本将非常巨大。因此就需要将ISP安排在CDC座舱控制器内部,而通过高速传输线缆将摄像头的raw数据传送到集中式的ISP来做处理。此时就需要用高速视频传输总线。
如同高速音视频传输接口章节所描述的一样,此时通常用GMSL或者FPDlink,实现远端Camera的raw数据传输到CDC中来。未来还可能采用的技术有Mipi-A phy 和ASA。此时Serdes芯片一般成对设置,在摄像头端集成有serializer chip;在CDC端则设计有desilizer chip;它们之间的距离可以长达10米,最长不超过15米。
OMS(Occupant Monitor System) 乘客及后座检测系统的简称。在法规上,已经有不少地区和国家在立法要求做车内儿童检测。欧洲NCAP计划从2023年1月起增加对车内儿童存在检验测试的评分,各项规定非常细致。美国正在立法要求所有新车预装儿童存在检测功能,预计在2025年全方面实施。据说国内相关规范也在评估制订中。
OMS摄像头可以在某些特定的程度上满足车内儿童存在检验测试的要求。为了更好的提高检测的准确性,甚至还要求增加生命体征检测雷达(UWB或者毫米波雷达)。从目前的实践来看,一般在前排后视镜位置布置一颗5MP,甚至8MP的OMS主摄像头;在第二排第三排座位上方增加2MP的后排OMS。通过人脸识别,动作捕获,活体检测等的应用,OMS能提高智能座舱车内的感知。
OMS还可以为如下应用功能提供支持:车内视频会议系统;安全支付系统;人工智能助手融合感知系统等。
为了保证在座舱环境内任何光照强度下都能正常使用,OMS一般要求支持RGB-IR,可见光和红外光双波段工作模式,同时需要布置红外补光灯。在夜间能够使用IR红外光进行仔细的检测;在白天采用RGB可见光进行工作。
TOF是Time of flight的简写,直译为飞行时间的意思。所谓飞行时间法3D成像,是通过给目标连续发送光脉冲,然后用传感器接收从物体返回的光,通过探测光脉冲的飞行(往返)时间来得到目标物距离。这种技术跟3D激光传感器原理基本类似,只不过3D激光传感器是逐点扫描,而TOF相机则是同时得到整幅图像的深度信息。TOF相机与普通机器视觉成像过程也有类似之处,都是由光源、光学部件、传感器、控制电路和处理电路等几部单元组成。与同属于非嵌入式三维探测、适用领域非常类似的双目测量系统相比,TOF相机具有根本不同的3D成像机理。双目立体测量经过左右立体像对匹配后,再经过三角测量法来进行立体探测,而TOF相机是通过入、反射光探测来获取的目标距离获取。
由于TOF采用多点发射和测量的方法来计算并得出深度信息,因此它的特点是分辨率低,功耗高。受激光发射点的限制,其分辨率正常情况下不会超过640*480,功耗却是结构光的十倍以上。
双目结构光采用的是双目立体视觉的技术,它模仿人眼的左右视差,用2个红外摄像头从左右两个方向获取被测物体的两幅图像,然后计算图像对应点之间的偏差,采用三角测量的方式计算得出视差图,再转换为3D深度信息。在这里的结构光,指的是红外投射器会投出一个简单的红外光点阵,用来增强物体表面的纹理,然后再由IR摄像头拍摄物体图像,利用算法进行后期计算处理。
1 相机标定:主要包含两部分内容: 单相机的内参标定和双目相机的外参标定,前者能够得到每个相机的焦距、光心、畸变系数等参数,后者能够得到双目相机之间的相机坐标系的旋转、平移关系。
2 立体校正:该过程是根据相机的标定结果,对两个相机采集到的原始图像进行校正,校正后的两张图像位于同一平面且互相平行,即图像的每行像素之间共线 立体匹配:该过程是根据立体校正后的图像,进行像素点的匹配,匹配成功的点表示真实世界中的某点在这两个图像中的不同位置。
4 深度计算:对立体匹配后得到的2幅图,利用三角测量法逐个计算每一个像素点的视差,得到视差图后,再转换成为深度图。
资源需求低,只要2个普通的IR相机,搭配一颗带DSP的SOC芯片即可计算获取深度图。但它的缺点是必须配置双目,并要求具有一定的基线长度,因此它的安装环境受限。2.3 单目结构光
结构光,英文叫做 Structured light,基础原理是通过近红外激光器,将具有一定结构特征的光线投射到被拍摄物体上,再由专门的红外摄像头进行采集。这种具备一定结构的光线(激光散斑),会因被摄物体的不同深度区域,而采集不同的图像相位信息,然后通过运算单元将这种结构的变化换算成深度信息,以此来获得三维结构。简单来说就是,通过光学手段获取被拍摄物体的三维结构,再将获取到的信息进行更深入的应用。一般会用特定波长的不可见的红外激光作为光源,它发射出来的光经过一定的编码投影在物体上,通过一定算法来计算返回的编码图案的畸变来得到物体的位置和深度信息。
相对于TOF,结构光的功耗较低,因为它只需要投射一小块区域就能够完全满足要求。它的分辨率和精度都高于TOF,且成本也比TOF低。相比双目结构光,单目结构光的基线能做到较小,方便布置在车内环境中。并且它在低光照条件下仍旧能使用,更适合车内环境。
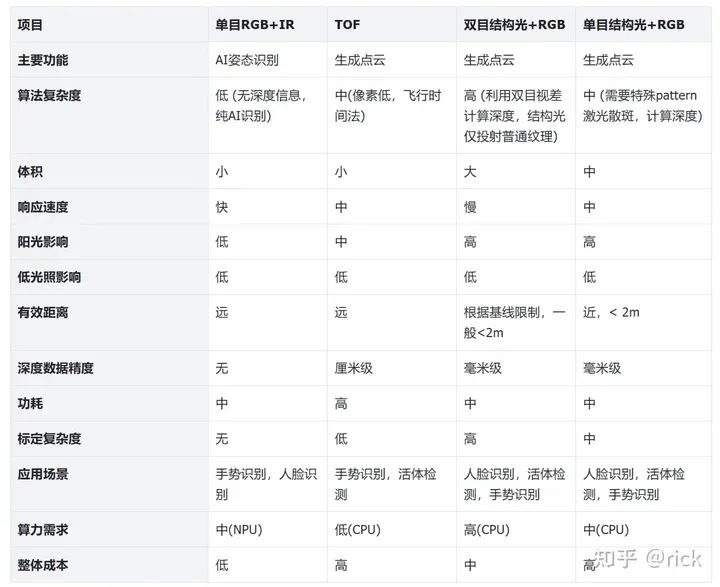
之外,多模态识别对视觉感知的需求慢慢的升高。其中,增加了深度信息的手势识别,人脸面部表情识别,情绪识别,口语识别等功能将给车载AI助手赋予更高的智能,提升了智能座舱的用户感受度,给予了良好的体验。对上述感知摄像头方案作比较,除了不带深度信息的单目RGB+IR之外,其余3种都是深度相机的可选项。
双目结构光+RGB方案,最大的问题就在于实现算法需要很高的计算资源,导致实时性很差,而且基本跟分辨率,检测精度挂钩。也就是说,分辨率越高,要求精度越高,则计算越复杂,同时,纯双目方案受光照,物体纹理性质影响。所增加的RGB摄像头只有1路,大多数都用在与深度图的对比显示。
TOF方案,由于硬件条件限制,其分辨率较低,感知精度低于结构光和双目立体方案。需要多点激光发射,硬件成本高,但是它的算法复杂度低,实时性高,可达120帧率,并且硬件计算资源需求较低。
单目结构光方案,目的是为了解决双目中匹配算法的复杂度和鲁棒性问题而提出,该方案解决了大多数环境下双目的问题。但是,在强光下,结构光核心技术激光散斑会被淹没,因此,在阳光强烈的时候,可能会失效。
DMS(Driver Monitor System)驾驶员监测系统的简称。指在驾驶员行驶过程中,全天候监测驾驶员的疲劳状态,危险驾驶行为等。在发现驾驶员出现疲劳,打哈欠,眯眼睛,抽烟,接打手持电话等行为后,DMS系统及时的对此类行为做多元化的分析,并进行语音和灯光等提示,起到警示驾驶员,纠正错误驾驶行为的作用。
由于DMS大多数都用在驾驶员异常行为的监测,因此它主要属于ADC无人驾驶域,而不属于CDC智能座舱域。但是DMS一般安装在舱内A柱下方,直接面对驾驶员的面部,因此也可以算入智能座舱内部的摄像头之一。
DMS一般都会采用2MP的红外摄像头,无需采用RGB工作模式。它所拍摄的画面,需要让“机器”能够看得清,让AI算法对司机的状态分析准确;而无需让“人”看得舒服。因此,DMS只要求到2MP的像素分辨率即可,并且需要红外补光摄像头,保证在任何光照条件下都能够让机器看清楚驾驶员的面部特征。
需要注意的是,DMS和OMS都具有红外补光灯,因此就需要设计专门的红外灯同步
,确保DMS和OMS的补光灯不能同时工作,以避免产生过曝现象。DMS感知算法的逐步提升,还包括眼动跟踪,面部表情,情绪监测等。和AI助手相配合的多模态识别,还将包含口型检测等进一步的AI识别算法得到应用。
车载DVR,即Digital Video Recorder,也正是行车记录仪。在DVR的功能当中,分为车载前装DVR和后装DVR。后装DVR一般是独立的行车记录仪设备,它使用音视频编码技术,将DVR自带的摄像头数据来进行转换和压缩,保存在DVR的存储设备中。由于后装设备无需满足车规标准,在汽车出厂时也不包含此设备,需要在汽车配件市场进行后期安装,因此它能够使用消费级的
芯片,其可靠性也远远达不到车规级的要求。前装DVR则需要满足车规级标准,在汽车出厂时就已经安装好,它的使用的时间和可靠性都需要按车规电子的标准来要求。
通常,前装DVR可以无需设置单独的摄像头,而是直接复用ADAS无人驾驶域的摄像头即可。一般来说,DVR可以保存前向广域摄像头(FOV达到120°)+SVC 360环视摄像头的图像数据。为满足白天+黑夜的数据记录要求,以及满足进出隧道等摄像头高动态范围识别要求,前向DVR摄像头和SVC环视都要求满足HDR(High Dynamic Range)的要求。因此,必须要求摄像头支持HDR模式,ISP也要求支持HDR模式。
SVC(Surround View Cameras)即环视摄像头,它一般布局在车头(前向),车尾(后向),左后视镜(左向),右后视镜(右向)。SVC是多摄像头系统,允许驾驶员拥有360度视野,实时查看车辆旁边的环境。此系统通过显示图像合成算法,将多个摄像头的视角融合,得到在高处环视车辆的“上帝视角”。
SVC 同样主要属于ADC无人驾驶域,因为对于泊车辅助系统来说,需要SVC摄像头来帮助感知泊车的停车位和旁边的环境。因此,SVC 360环视摄像头也被称为Parking Assistance Camera。

CMS(Camera Monitor System)即流媒体后视镜。CMS是用电子方式取代传统的玻璃镜面倒车镜,它有很多个名字,有叫电子侧视镜,虚拟倒车镜,电子倒车镜, 电子取代镜等,ISO 国际标准组织称其为摄像头监控系统,即 Camera Monitor System。
屏幕。据称是 OLED 屏响应速度快大约 100 毫秒。奥迪表 示,外侧摄像头系统有助于将阻力系数从美国版的 0.28 提高到 欧洲版的 0.27。对于纯电动汽车来说,在高速上,这个微小的差别能增加 3 英里的续航能力。这个非规则形状的 OLED 屏成本极高,且角度略低,轻易造成驾驶员分心,下一代奥迪有很大的可能性改回标准矩形,放在 A 柱附近。目前全球只有日本和欧洲的法规允许使用电子后视镜系统代替玻璃视镜。欧洲法规方面主要有 UN ECE R46-2016《关于间接视野装置及安装间接视野装置车辆
的统一规定》和 ISO 16505-2019《摄像头监视系统的人体工程学和性能方面的要求和试验程序》 。还有一个法规 IEEEP 2020 Standard forAutomotive System Image Quality(车载相机图像品质衡量准则), IEEEP2020 希望规范是车上的所有的摄像头图像质量相关的测试和问题。无论是人类视觉应用,还是计算机视觉应用都在其范畴。并且其主要规范的就是摄像头成像系统的图像质量。目前CMS还需要专用的摄像头(HDR),传输通道,以及显示屏。摄像头分辨率和帧率一般最高只能达到2MP 60fps或者4MP 30fps,且成本相当高昂,在实用性上还有一定的差距。
的中国国标GB 15084-2022已经于2023-07-01生效,允许汽车安装流媒体后视镜,这中间还包括各种I,II,III类镜。6.2 CMS性能要求
I类镜,也称为电子内后视镜,它主要是利用后置摄像头,将Camera拍摄到的视频流传输到车内中央的后视镜上进行显示。而III类镜,也称为电子外后视镜,它大多数都用在替代车身左右侧外部后视镜,将安装在车身两侧向后观察位置的摄像头视频流显示在车内显示屏上。

在GB15084-2022中,对CMS的性能提出了很具体的要求,并提出了检测标准:
方向均匀性:为了确认和保证驾驶员在预期的不同方向观察显示屏时,显示屏有充足的可见性,限制从不同方向观察的图像亮度衰减,并规定了方向均匀性。
亮度对比度复现:为了确认和保证CMS在不同使用环境条件下的图像质量以及可辨识的车外视野,规定了亮度对比度复现的要求,分别选取阳光直射,散射环境光,日落条件,夜间条件等4种典型场景来评估。
灰度与色彩还原:CMS应能在显示屏上显示至少8个不同的灰度等级;在色彩还原度测试上,按ISO16505规定的办法来进行试验,并满足规定的要求。
弥散:为了避免强光源照射摄像机镜头而在显示屏上形成光芒状的亮条对驾驶员产生干扰,规定了弥散要求,限制弥散亮度值,不大于引起弥散的光源影像最大亮度值的10%。
光晕和眩光:按ISO16505规定的方法做试验,光晕和镜头眩光区域应不大于所显示影像面积的25%。
点光源:为了在夜间行车时驾驶员能够明确区分车后机动车的两个前照灯,规定了点光源的要求。点光源发现系数应不小于2.7,或点光源对比度系数应不小于0.12。
锐度,景深,几何畸变:为了使驾驶员观察车外视野内目标的识别能力,需要规定锐度,景深,几何畸变的测试标准,并按ISO16505规定的办法来进行验证。
帧率:CMS的帧率至少为30fps,在低光照条件或车辆低速行驶时能够更好的降低到15fps。
成像时间和系统延迟:显示器成像时间应小于55ms,车外事件发生时到车内监视器输出图像的时间为系统延时,不应低于200ms。
,ISP处理,显示屏等一系列环节进行系统分析,在光学,机械,电子等方面做软硬综合一体的设计,才能得到满意的结果。6.3 CMS系统架构
方案”和“SOC方案”两种配置——前者功能简单、价格低、延时低;后者功能丰富、价格高、延时高。CMS系统核心的处理任务是ISP,如果只是将CMS摄像头采集到的图像用来做显示的话,就只需要MCU即可;另外可以在经过ISP处理后的图像基础上加一些应用层的功能(例如BSD、开门预警等功能),但要加SOC。前者MCU方案功能简单,省去了SOC核心板成本,价格更低;后者SOC方案价格更高,由于新增一些功能处理,系统延时也相较于前者更高。MCU方案中ISP处理可以放在显示屏里(屏厂Tier1偏好的方式),也可以放在摄像机里(摄像机Tier1偏好的方式)。对于MCU方案,CMS系统负责ISP的处理器可以放在屏幕里,也可以放在摄像机中,这种方案没有独立的CMS控制器。对于SOC方案,可以放在独立的CMS控制器中,未来也可以被集成到智能驾驶域控制器或者智能座舱域控制器中。上述不同的方案对应了不同的系统成本,简要介绍2种不同的系统架构方案:
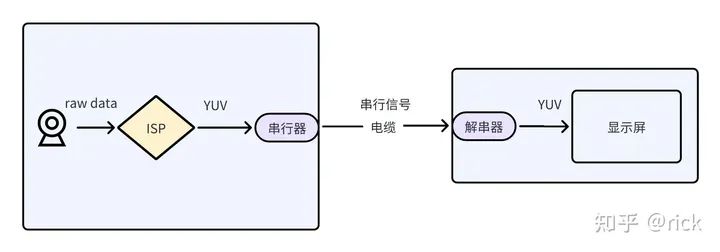
1、处理芯片ISP集成在屏幕,与相机模组分离:显示屏供应商希望把整个处理囊括在屏里,也就是把基于显示屏为处理核心的模块嵌入到屏的板子上,来处理前端相机传输进来的图像信息,来配合整个屏的模组模块化设计。。
2、处理芯片ISP与相机集成在外耳,与舱内显示屏分离:做耳镜也就是摄像头的供应商,他们盼望把处理器嵌入到两侧耳镜当中,来适配舱内不同屏的厂家。这种方案可以使得总系统小型化,在外耳镜端器件可以用小的封装在长条形或者半圆形的两侧耳镜模块当中。摄像头采集到的Rawdata传输进来可以在耳镜端直接做ISP处理,然后在舱内显示屏中做显示。
3、处理芯片ISP集成在智能座舱域控制器CDC,Camera复用:在这种方案下,将以中央计算平台为
,利用智能座舱SOC芯片强大的ISP解决能力,同时复用车载摄像头输入原始raw data,实现成本最优。
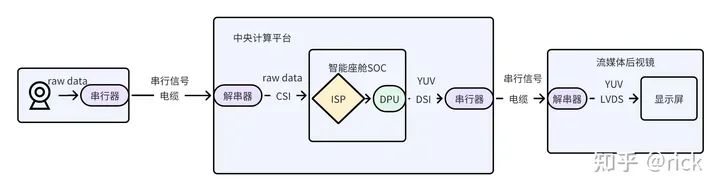
在本方案中,摄像头为原车载ADAS域摄像头,ISP使用了中央计算平台中的智能座舱SOC,新增器件只有显示屏,可见在三种方案中成本最佳。但该方案对于III类镜所需的功能安全要求是一个挑战,因此还未能达到立即商用的程度,可当作未来发展的一个方向进行研究。

本帖最后由 shthdz3102 于 2017-1-18 09:46 编辑
模组为何需要用EEPROM+ j, v) m: f! E/ a; z以往在
技术正在慢慢地改变我们的生活,而未来,它将为我们彼此以及与周围世界的互动方式带来深刻的变化。从打造更安全、更高效的智慧城市,到实现安全、经济
,是一种利用互联网传输动态视频的设备,它可以将本地的动态视频利用互联网传输到世界各地有网络连接的地方,利用互联网,用户都能够随时看到想监控的地方,拓展了人类的视野范围
时钟线MHz的整数倍上有强干扰并且落在GPS中心频点1575.42MHz附近,而且奇次倍频和偶次倍频幅值不同。在
分享一下,同时也希望过多的人参与进来,共同分享,共同进步!首先第一步就要实现能够访问本地
,参考例子,若无法正常使用,要安设VISION工具包,下载地址[url=]http
` 本帖最后由 vikingsailor 于 2015-1-24 21:29 编辑 我想用B+做一个如图所示的多
不知道为什么,ni-vision都安装啦,我也使用IPCamAdapter将wifi
,选cam1但是程序采集的图像是cam0的图像 补充内容 (2017-9-12 15:48): 把session in改变为常量也不管用 补充内容
就是一片黑色,照出来的照片也是全都是黑色,请问这是什么原因呢?(程序在别人的电脑上面可以运行)
想要采集图像信息,通过单片机驱动之后无线传输给pc终端。第一步是不是要做好u***
这方面 应该从哪些地方学起啊u***和单片机之间是不是要用u***转com口的芯片 然后把图像信息传进来啊?
采集的视频图像数据通过HDMI实时显示。 系统模块设计:Perf-V开发板可以连接高速口——HDMI
试用计划:申请理由本人目前从事linux驱动开发,目前从事车载行业的存储可靠性及文件系统方面工作,希望能够通过这次活动为电子发烧友论坛做点贡献,日后多在这论坛活跃,同时希望
,用串口和底板(FPGA+ARM)通信控制电机动作,用网络(手机/PC)来控制我们的产品的方案。由于RT5350功耗
本文将探讨机器视觉应用的 CMOS 图像感应器技术及架构要求。此外,还将详细分析机器视觉的基本组件,
ic @@@ 赵先生 同步微信 QQ:8798-21252)帝欧电子 实力回收 工厂或个人电子料--
是指通过数据线或者其他方式将手机与数码相机进行连接,以此实现拍摄,这种拍摄方式的操作更方便快捷。目前手机具备的数码相机功能仍旧处于
“OpenHarmony”)兼容性测评,并获颁OpenHarmony生态产品兼容性证书,意味着这两款终端产品满足OpenHarmony兼容性定义的技术方面的要求。近年来,
捕捉前方画面,单片机处理,并把画面通过无线通信传到电脑上,哪位大神能帮我讲解下整一个完整的过程????1:
,好坏都要, 回收手机IC及电子料,MTK,展讯,高通,字库(MCP),手机主板,PCBA
ic @@@ 赵先生 同步微信 QQ:8798-21252)帝欧电子 实力回收 工厂或个人电子料
,深圳帝欧电子,QQ:8798-21252专业高价回收回收帝欧电子高价收购vivo手机后置
广泛运用于我们的生活之中,大街上随处可见的安防监控,人手至少一台的手机平板,汽车
是目前比较流行的一种,外观更隐蔽,安装较为轻松。另一种是专孔安装,嵌入保险杠的
带有浮动限位功能,未测试时,浮板为弹片状态,轻轻按压浮板即可露出测试PIN针,起到了保护作用,避免PIN针
带有浮动限位功能,未测试时,浮板为弹片状态,轻轻按压浮板即可露出测试PIN针,起到了保护作用,避免PIN针弯曲
MUC204微型
近年来,随着时下人们对驾驶安全水平需求的逐步的提升,高级驾驶辅助系统(ADAS)有关技术的不断成熟,伴随着ADAS市场高速发展,
的需求也更加旺盛。其应用场景也是非常多的,主要是以下几个应用场景:倒车
系统在车辆中的应用日趋普遍,对改型仪表板录像机(行车记录仪)、辅助驾驶、报警
以及夜视系统的需求也与日俱增。 由于花了钱的人这些系统的功能需求日益增多,所以
时显示mmal: No data received from sensor. Check all connections, including the Sunny one on the camera board,连接正常没问题,请问是怎么回事呀?
首先我们要注意到监控设备不是同一属性 安装的方式会不一样的,专业的监控安装行业一定要注意很多细节。监控
的安装方法:1)在满足监视对象视场要求的条件下,室内安装高度不小于2.5m,室外安装高度
的效果,主要看他的芯片和线数。一般买个二百多的索尼芯片的效果就可以了。监控
是整个监控系统的核心设备,选型时应根据现场环境和客户的真实需求,慎重选择。针对我公司监控
应用范围广阔:区域性监控,利用网络传送实时图像,如办公室、大楼等;跨区远端监控,连锁事业、大型工厂机房、远端老人、儿童看护、公共建筑、无人环境监控、金融机构分行监控、交通监管、错误警报辩识等。相关延伸:网络
。深圳帝欧专业回收电子物料。帝欧赵生***/879821252/1714434248邮箱本
、LED灯的分组排列。例如,以24颗的红外来说,可以把它排列成3组来减低热量。5、结构材质的选择。例如,LED灯板和外壳选用铝合金等散热比较好的材料。6、
本帖最后由 xc742052395 于 2013-6-24 18:25 编辑 手上有遥控玩具飞机
,深圳帝欧电子专业多年回收电子,赵生***,//1816233102,mail:,回收手机
,并按要求安装了视频采集卡,但发现还是只能在它自己的客户端上使用,LabVIEW既不显示也无法调用。问了一些人,他们说
,好坏都要, 回收手机IC及电子料,MTK,展讯,高通,字库(MCP),手机主板,PCBA,手机光板(新板),废旧
,好坏都要, 回收手机IC及电子料,MTK,展讯,高通,字库(MCP),手机主板,PCBA,手机光板(新板),废旧
,好坏都要, 回收手机IC及电子料,MTK,展讯,高通,字库(MCP),手机主板,PCBA,手机光板(新板),废旧
中的核心感知设备,具有识别能力强、更符合人眼视觉感知的优点,所获取的图像既可以输入给屏幕系统
中的核心感知设备,具有识别能力强、更符合人眼视觉感知的优点,所获取的图像既可以输入给屏幕系统